ロボットのジョギング
を参照してください Robotics_Jogging.project のインストールディレクトリにあるサンプルプロジェクト CODESYS 下 ..\CODESYS SoftMotion\Examples。
この例は、軸グループをジョギングする方法を示しています。 SMC_GroupJog2 POU。
をインストールすることをお勧めします CODESYS Depictor この例では(無料のデモバージョンで十分です)。または、Depictorなしで例を使用するために、対応するコード部分を例から削除することもできます。
応用
可能な限り最も一般的なケースを示すために、この例には次の関数があります。
特異点のあるロボット(6軸多関節ロボット)の使用。この例は、ACSの特異点を介してロボットを移動し、別の構成でデカルトの方法でジョギングを続けることができることを示しています。
ワールド座標系(WCS)に対するロボットの機械座標系(MCS)のシフトと回転。このようにして、MCSとWCSでジョギングがどのように異なるかを確認できます。
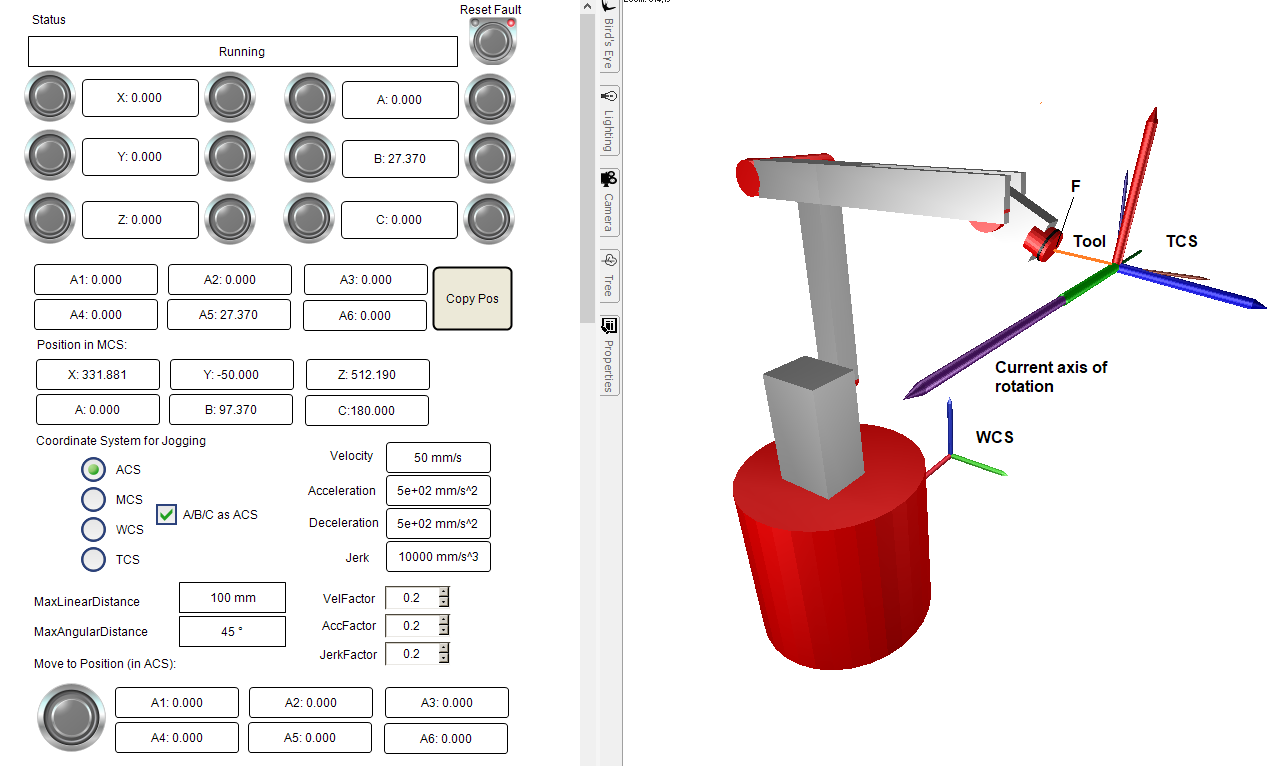
フランジ(F)に対してシフトおよび回転したツールの構成。次の図では、ツールと、フランジ(F)に対するTCSのシフトと回転を確認できます。
直線追加軸
Add0そして回転軸を追加します。Add1。
アプリケーションの構造
メインプログラム
メインプログラム
PLC_PRGステートマシンで構成され、軸グループをアクティブにします(状態0)
ツールを構成します(状態5)
MCSを構成します(状態6)
ジョギングを開始します(状態10)
状態20では、ジョギングエラーが処理され、移動コマンドが受け入れられます(位置へ移動 視覚化のスイッチ)。
その他の状態は、移動 (60、70) の実行と、エラーの処理および確認 (900、1000) に使用されます。
ステートマシンによれば、すべてのロボットPOUと
GroupJog2プログラムは周期的に呼び出され、Depictor での 3D 表示のための計算がいくつか実行されます。
GroupJog2プログラム
このプログラムには、次の手順を実行するステートマシンが含まれています。
状態10では、SMC_GroupJog2の入力が設定され、ロボット軸の構成が読み取られます(SMC_GroupReadActualPosition)。この構成は、軸グループ(SMC_SetKinConfiguration)の状態20で実行されます。
状態30では、システムはジョギング中のエラー、およびジョギングの設定の変更(たとえば、変更された座標系)に反応します。変更がある場合、システムは状態10に戻ります。
状態50は、イネーブル入力の立ち下がりエッジで入力されます。ジョギングはMC_GroupHaltによって停止されます。
試運転
作成したプログラムをコンパイルして起動します。ビジュアライゼーションを使用してロボットを実行できます。ジョギングに関連するすべての設定を定義できます(たとえば、どの座標系がどの速度でジョギングされるか)。
インストールしている場合 CODESYS Depictor、次に、Depictorを使用してウィンドウを配置することをお勧めします(Scene POU)視覚化ウィンドウの横。
Depictorは、ロボットの前面にあるTCS(ツール座標系)を表します。さらに、TCSの現在の回転軸は紫色で表示されます。これは、さまざまなタイプの向きの変化を確認するのに役立ちます(たとえば、 ABC_as_ACS オプションと TCS 座標系)。